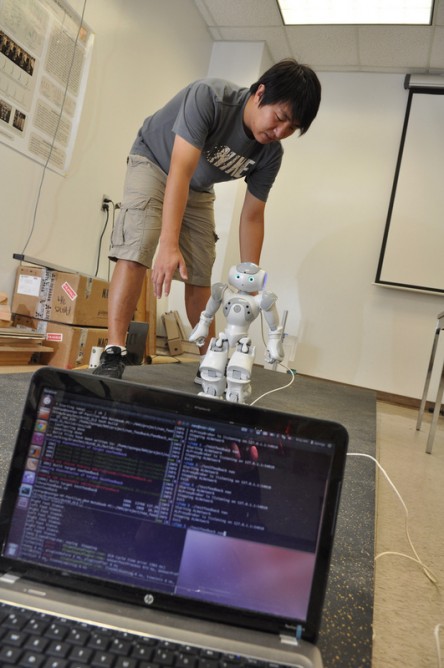
Двуногие роботы доказали сложность для робототехников в имитации движений людей при ходьбе. Тем не менее, инженеры лаборатории AMBER Техасского университета создали универсальную математическую функцию ходьба, полученную при анализе человеческих данных и оптимизированную для роботизированных систем.
Их собственное доказательство этой концепции является новым роботом, демонстрирующим походку поразительно схожую с походкой человека. Кроме того, эта система имеет потенциал для применения и к другим двуногим роботам, чтобы обновить их возможности.
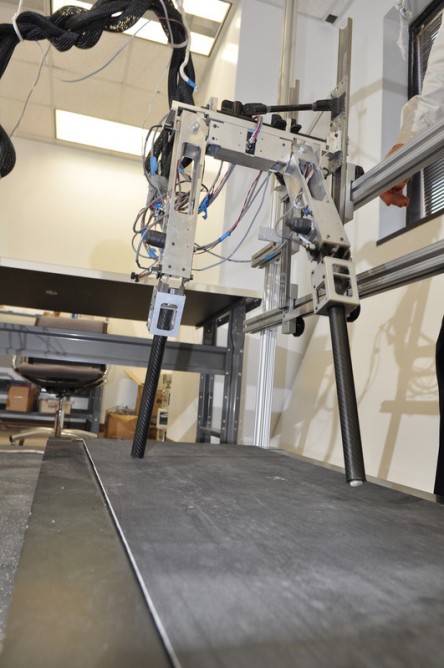
Система AMBER основана на полученных из измерения движений человека различных характеристиках, таких как скорость и угол сгибания и разгибания коленного сустава при подъеме по лестнице. Тем не менее, в этом конкретном примере у человека в коленном суставе имеются шипы скорости вращения, которые пока невозможно создать в роботизированных системах, что также является ограничением.
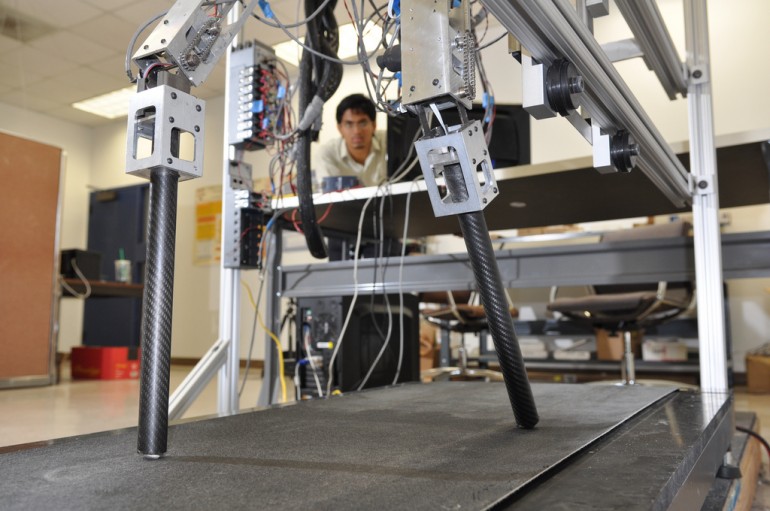
На этом видео в тестах можно увидеть силу математического моделирования, которая позволяет роботу сгибать колени под нужным углом для преодоления препятствий в виде деревянных досок. Он реагирует аналогично тому, как человеку отставляя ногу назад, стремится поглотить дополнительную динамику, а также осуществляет дополнительные компенсационные маленькие шаги вперед.
Прямохождение является наиболее сложным с математической точки зрения процессом для реализации, особенно по сравнению с другими методами передвижения, доступными для робототехники. Наши центры тяжести на самом деле расположены не в центре, а мы, по существу, меняем свой центр тяжести во время перемещения.